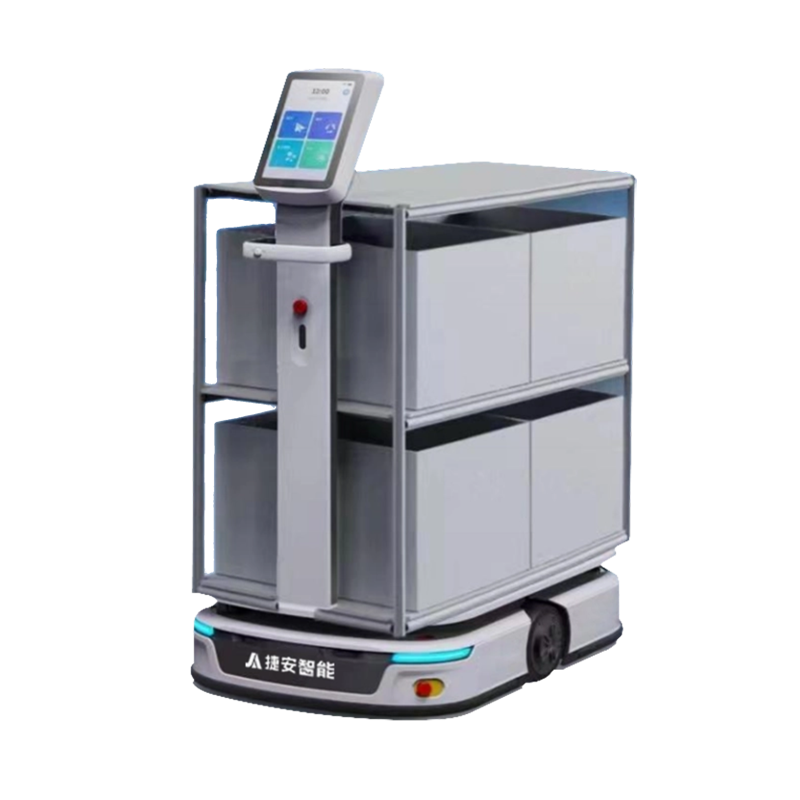
Independently identify the surrounding environment, prevent collisions, prevent foot pressure, prevent falls, respond quickly, and ensure safety without worries,
Real time optimal route planning to ensure multiple machines operate simultaneously and efficiently complete tasks smoothly